CANBUS: Understanding the Controller Area Network
The Controller Area Network (CANBUS) is a communication protocol that is widely…
Walk through almost any modern vehicle's wiring harness and you will find, at its core, a deceptively simple pair of twisted wires carrying an extraordinary amount of information. That pair is the Controller Area Network — CANBUS — and understanding how it works explains a great deal about why modern vehicles can monitor hundreds of parameters simultaneously, flag faults in milliseconds, and do it all without the weight and cost of point-to-point wiring between every module on board.
This article covers what CANBUS is, where it came from, how its communication architecture actually functions, and why it has spread well beyond the automotive industry into medical equipment, aerospace, and industrial automation.
A Protocol Born from Automotive Complexity
CANBUS was developed by German engineering firm Robert Bosch GmbH in the 1980s. The context matters: vehicles were acquiring electronic control units at a rapid pace, and each new system — engine management, transmission control, anti-lock braking — demanded communication with the others. Wiring every unit directly to every other unit was becoming physically impractical and prohibitively expensive. Bosch's solution was a shared, two-wire serial bus that any node on the network could read from or write to.
The protocol was formally introduced in 1986 and standardized under ISO 11898 for high-speed applications and ISO 11519 for lower-speed use. It was adopted broadly by European automakers through the late 1980s and early 1990s, and by 2008, the United States mandated CANBUS-based OBD-II diagnostic access on all new passenger vehicles sold domestically.
How CANBUS Works
Differential Signaling on Two Wires
CANBUS transmits data across two wires: CAN High (CANH) and CAN Low (CANL). Rather than measuring a single wire's voltage against ground, the receiving node reads the voltage difference between the two. This differential signaling approach gives CANBUS strong resistance to electromagnetic interference (EMI) and electrical noise — a significant advantage inside a vehicle where ignition systems, alternators, and electric motors generate interference constantly.
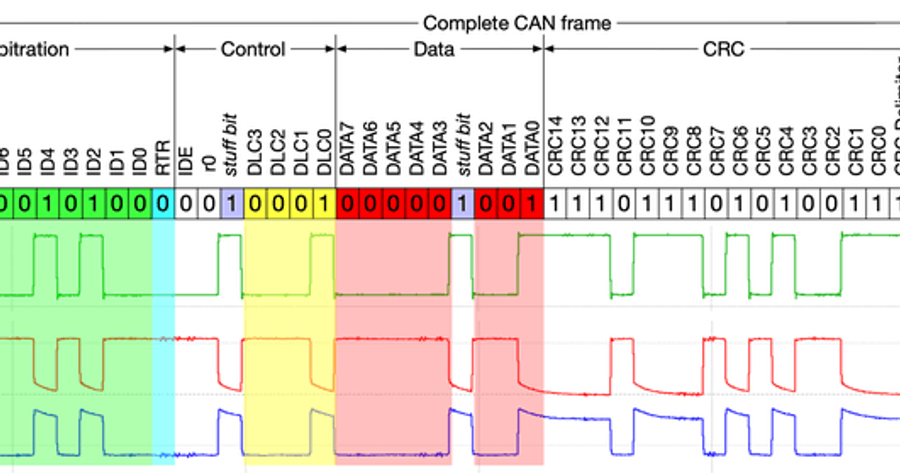
Frames, Identifiers, and Priority
Data travels across the bus in discrete packets called frames. Each frame carries two key elements: an identifier and a data payload. The identifier does two jobs — it labels what kind of message is being sent, and it sets the message's transmission priority. Standard frames use an 11-bit identifier, supporting 2,048 unique message types. Extended frames use a 29-bit identifier, which expands that ceiling to over 536 million unique identifiers.
Priority resolution is elegantly simple: lower identifier values win. If two nodes attempt to transmit simultaneously, the bus arbitration logic detects the conflict and the node with the higher identifier value backs off and retries. No message is lost; the higher-priority transmission completes cleanly.
Multi-Master Architecture and Collision Handling
CANBUS uses a multi-master, multi-slave architecture, meaning any node can initiate communication rather than waiting for a central controller to poll it. When a collision is detected — two nodes writing to the bus at the same moment — the collision detection mechanism causes the lower-priority node to withdraw and attempt retransmission after a brief interval. This keeps data integrity intact without requiring a dedicated arbitration controller.
Advantages of CANBUS
Reliability in harsh environments. The differential signaling scheme, combined with built-in error detection (including cyclic redundancy checks within each frame), makes CANBUS well-suited to electrically noisy environments like engine bays and factory floors.
Scalability. New nodes can be added to a CANBUS network without reconfiguring existing nodes or interrupting active communication. This makes network expansion straightforward during vehicle development or industrial system upgrades.
Data rate range. CANBUS supports speeds from 10 kbps up to 1 Mbps, covering everything from low-priority body control functions to time-critical powertrain management. More recent derivatives such as CAN FD (Flexible Data-rate) extend throughput to 8 Mbps for applications demanding higher bandwidth.
Cost efficiency. Two wires replace what would otherwise be dozens of dedicated signal lines. The protocol's widespread automotive adoption has also driven down the cost of compatible microcontrollers, transceivers, and diagnostic tools substantially.
Where CANBUS Is Used
Automotive Systems
In a modern vehicle, CANBUS connects the engine control module, transmission control module, body control module, airbag controller, instrument cluster, and many other ECUs. A single vehicle may carry more than 70 individual ECUs, all sharing bus capacity across multiple CANBUS networks segmented by function and speed requirements. For a closer look at how vehicle data recorded across these networks is analyzed after an incident, see our Detailed Analysis of Forensic Vehicle EDR Examination.
Industrial Automation
Factory automation systems use CANBUS to coordinate sensors, actuators, programmable logic controllers, and human-machine interfaces. The protocol's deterministic priority system suits manufacturing environments where certain signals — emergency stops, for instance — must always get through without delay.
Medical Equipment
Patient monitors, infusion pumps, and surgical instruments use CANBUS to exchange data between subsystems in real time. The protocol's error-detection capabilities and proven reliability make it appropriate for environments where communication failure has direct consequences for patient safety.
Energy Management Systems
Solar installations and battery energy storage systems use CANBUS to link inverters, battery management systems, charge controllers, and load monitoring hardware. Real-time data exchange across these components enables efficient energy dispatch and state-of-charge management.
Aerospace and Aviation
Avionics, flight control systems, and on-board communication subsystems in aircraft use CANBUS where its weight savings, fault tolerance, and deterministic message prioritization meet aviation reliability requirements. For a broader look at how aviation principles cross over into vehicle technology, see Fusion of Frontiers: Avionics Meets Cutting-Edge Automotive Technology.
Marine and Maritime Systems
Vessels use CANBUS to integrate navigation, engine control, and onboard communication systems. The NMEA 2000 marine networking standard, widely used for instrument integration on recreational and commercial boats, is itself built on the CANBUS physical layer.
Key Takeaways
- CANBUS was developed by Robert Bosch GmbH in the 1980s to solve the growing complexity of in-vehicle electronics, and was standardized under ISO 11898; U.S. law required OBD-II CANBUS access on all new passenger vehicles from 2008 onward.
- The protocol transmits data over two wires (CANH and CANL) using differential signaling, which provides strong resistance to electromagnetic interference without complex shielding.
- Message priority is determined by frame identifier value: lower numbers win bus arbitration automatically, ensuring critical signals are never blocked by lower-priority traffic.
- Standard CANBUS supports data rates up to 1 Mbps; the newer CAN FD variant extends this to 8 Mbps for higher-bandwidth applications.
- Beyond automotive use, CANBUS underpins communication in industrial automation, medical devices, energy storage systems, aerospace avionics, and marine networking standards including NMEA 2000.
Written by
Vince Russell

